ZLTECH 24V-36V 5A DC برقي Modbus RS485 برش بيس موٽر ڊرائيور ڪنٽرولر AGV لاءِ


















فنڪشن ۽ استعمال
1 اسپيڊ ايڊجسٽمينٽ موڊ
خارجي ان پٽ اسپيڊ ريگيوليشن: 2 فڪسڊ ٽرمينل کي ڳنڍيو خارجي potentiometer جي GND بندرگاهه سان ۽ +5v بندرگاهه ڊرائيور جي ترتيب سان.رفتار کي ترتيب ڏيڻ لاءِ خارجي پوٽينيوميٽر (10K ~ 50K) کي استعمال ڪرڻ لاءِ، يا ٻين ڪنٽرول يونٽن ذريعي (جهڙوڪ PLC، سنگل چپ مائڪرو ڪمپيوٽر وغيره) ان پٽ اينالاگ وولٽيج کي SV آخر تائين ڳنڍيو (جي اين ڊي سان لاڳاپيل).SV بندرگاهن جي قبوليت واري وولٹیج جي حد DC OV کان + 5V آهي، ۽ لاڳاپيل موٽر جي رفتار 0 کان درجه بندي جي رفتار آهي.
2 موٽر رن / اسٽاپ ڪنٽرول (EN)
موٽر جي هلڻ ۽ بند ٿيڻ کي ڪنٽرول ڪري سگهجي ٿو آن ۽ آف ٽرمينل EN جي نسبت سان GND.جڏهن ٽرمينل conductive آهي، موٽر هلندي؛ٻي صورت ۾ موٽر بند ٿي ويندي.جڏهن موٽر کي روڪڻ لاءِ رن/اسٽاپ ٽرمينل کي استعمال ڪندي، موٽر قدرتي طور بند ٿي ويندي، ۽ ان جي حرڪت جو قانون لوڊ جي جڙت سان لاڳاپيل آهي.
3 موٽر فارورڊ/ ريورس رننگ ڪنٽرول (F/R)
موٽر جي هلندڙ هدايت کي ڪنٽرول ڪري سگهجي ٿو آن/آف ٽرمينل F/R ۽ ٽرمينل GND کي ڪنٽرول ڪندي.جڏهن F/R ۽ ٽرمينل GND هلائيندڙ نه هوندا ته موٽر هلندي هلندي ڪلاڪ جي طرف (موٽر شافٽ جي پاسي کان)، ٻي صورت ۾، موٽر هلندي هلندي ڪلاڪ وار وار.
4 ڊرائيور جي ناڪامي
جڏهن ڊرائيور جي اندر اوور وولٽيج يا اوور ڪرنٽ ٿئي ٿي، ڊرائيور حفاظتي رياست ۾ داخل ٿيندو ۽ خودڪار طريقي سان ڪم ڪرڻ بند ڪري ڇڏيندو، موٽر بند ٿي ويندي، ۽ ڊرائيور تي نيري روشني بند ٿي ويندي.ڊرائيور الارم جاري ڪندو جڏهن فعال ٽرمينل ري سيٽ ڪيو ويندو آهي (يعني EN GND کان ڌار ٿيل آهي) يا پاور بند ڪيو ويندو آهي.جڏهن هي غلطي ٿئي ٿي، مهرباني ڪري چيڪ ڪريو وائرنگ ڪنيڪشن موٽر يا موٽر لوڊ سان.
5 RS485 ڪميونيڪيشن پورٽ
ڊرائيور ڪميونيڪيشن موڊ معياري Modbus پروٽوڪول کي اختيار ڪري ٿو، جيڪو قومي معيار جي مطابق GB/T 19582.1-2008.استعمال ڪندي RS485-بنياد 2-وائر سيريل لنڪ ڪميونيڪيشن، فزيڪل انٽرفيس هڪ روايتي 3-پن وائرنگ پورٽ (A+، GND، B-) استعمال ڪري ٿو، ۽ سيريل ڪنيڪشن تمام آسان آهي.
پيرا ميٽر
| ڊرائيور | ZLDBL4005S |
| ان پٽ وولٹیج (V) | 24V-36V ڊي سي |
| ٻاھر نڪرندڙ موجوده (A) | 5 |
| ڪنٽرول جو طريقو | موڊبس RS485 |
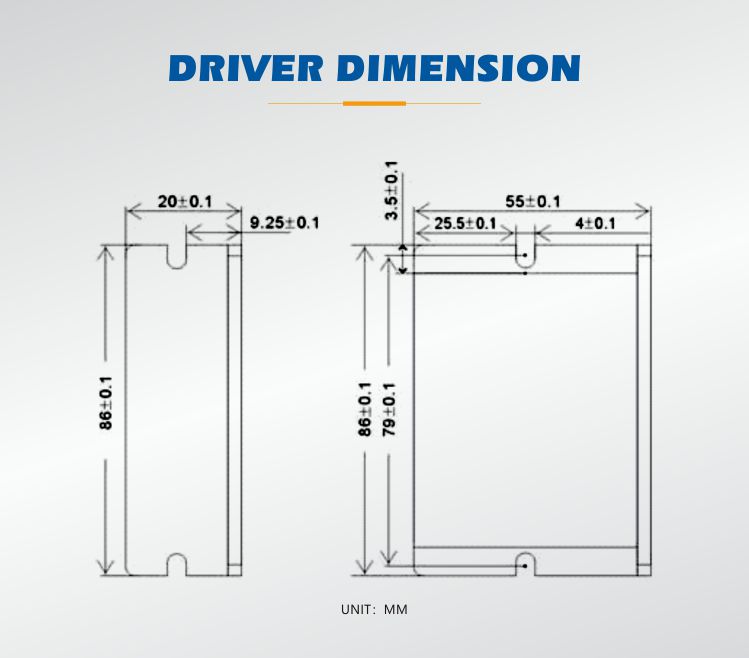
| طول و عرض (mm) | 86*55*20mm |
| وزن (ڪلو) | 0.1 |
طول و عرض
درخواست

پيڪنگ

پيداوار ۽ چڪاس جي ڊوائس

قابليت ۽ سرٽيفڪيشن

آفيس ۽ ڪارخانو

تعاون






